6 kg kandevõimega koostöörobotid





6 kg kandevõimega koostöörobotid
Peamine kategooria
Tööstusroboti käsi / Koostööroboti käsi / Elektriline haarats / Intelligentne ajam / Automatiseerimislahendused
Taotlus
SCIC Z-Arm kobotid on kerged neljateljelised koostöörobotid, mille sisse on ehitatud ajamimootor, ning need ei vaja enam reduktoreid nagu teised traditsioonilised scara-robotid, vähendades kulusid 40%. SCIC Z-Arm kobotid suudavad teostada funktsioone, sealhulgas, kuid mitte ainult, 3D-printimist, materjalide käitlemist, keevitamist ja lasergraveerimist. Need on võimelised oluliselt parandama teie töö ja tootmise efektiivsust ja paindlikkust.
Omadused

Kõrge täpsus
Korduvus
±0,05 mm
Suur kasulik koormus
Alus 4kg
Maksimaalselt 5 kg
Suurem kiirus
Maksimaalne lineaarkiirus 1,4 m/s
(Aluse kandevõime 4 kg)
Konkurentsivõimeline hind
Tööstusliku taseme kvaliteet
Ckonkurentsivõimeline hind
Lihtsalt programmeeritav, kiiresti paigaldatav, painduv 4-teljeline robotkäsi
Suur koormus
Standardkoormus: 4 kgMaksimaalne koormus: 5 kg
Kõrge täpsus
Korduvus: ±0,05 mm
Kohandatud Z-telg
Üles- ja allapoole liikumist saab kohandada vahemikus 10–1000 mm
Suur kiirus
Selle lineaarkiirus on kuni 1400 mm/s 4 kg koormuse all.
Lihtne kasutada
Seda on lihtne kasutada isegi neil, kes pole varem robotitega tuttavad.
Integreeritud ajam ja kontroller
Lisalülitust pole, lihtne paigaldada ja kokku panna

Seotud tooted



Spetsifikatsiooniparameeter
SCIC Z-Arm 4150 on disainitud SCIC Techi poolt. See on kerge koostöörobot, mida on lihtne programmeerida ja kasutada ning mis toetab SDK-d. Lisaks toetab see kokkupõrke tuvastamist, mis tähendab, et see peatub automaatselt inimese puudutamisel, mis on nutikas inimese ja masina koostöö ning kõrge turvalisuse tase.
| Z-Arm 4150 koostööroboti käsi | Parameetrid |
| 1-teljelise käe pikkus | 275 mm |
| 1 telje pöördenurk | ±90° |
| 2-teljelise käe pikkus | 225 mm |
| 2 telje pöördenurk | ±164° Valikuline: 15–345° |
| Z-telje käik | 410 Kõrgust saab kohandada |
| R-telje pöörlemisvahemik | ±1080° |
| Lineaarne kiirus | 1400 mm/s (kasulik koormus 4 kg) |
| Korduvus | ±0,05 mm |
| Standardne kasulik koormus | 4 kg |
| Maksimaalne kandevõime | 5 kg |
| Vabadusaste | 4 |
| Toiteallikas | 220V/110V50-60HZ kohandub 48VDC tippvõimsusega 960W |
| Suhtlus | Ethernet |
| Laiendatavus | Sisseehitatud liikumiskontroller pakub 24 sisendit/väljundit + käe alla laienemist |
| Z-telje kõrgust saab kohandada | 0,1 m ~ 1 m |
| Z-telje lohistamise õpetamine | / |
| Elektriline liides reserveeritud | Standardkonfiguratsioon: 24 * 23 awg (varjestamata) juhtmed pistikupesapaneelist läbi alumise haru katte Valikuline: 2 φ4 vaakumtoru läbi pistikupesa paneeli ja ääriku |
| Ühilduvad HITBOT elektrilised haaratsid | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100/5thTelg, 3D-printimine |
| Hingav valgus | / |
| Teise käe liikumisulatus | Standard: ±164° Valikuline: 15–345° |
| Lisatarvikud | / |
| Kasuta keskkonda | Ümbritseva õhu temperatuur: 0–45 °C Niiskus: 20–80% suhteline õhuniiskus (ilma jääta) |
| I/O-pordi digitaalne sisend (isoleeritud) | 9+3+käsivarre sirutus (valikuline) |
| I/O-pordi digitaalväljund (isoleeritud) | 9+3+käsivarre sirutus (valikuline) |
| I/O-pordi analoogsisend (4–20 mA) | / |
| I/O-pordi analoogväljund (4–20 mA) | / |
| Roboti käe kõrgus | 830 mm |
| Roboti käe kaal | 410 mm käiguga, netokaal 28 kg |
| Aluse suurus | 250 mm * 250 mm * 15 mm |
| Aluse kinnitusavade vaheline kaugus | 200mm * 200mm nelja M8 * 20 kruviga |
| Kokkupõrke tuvastamine | √ |
| Lohistamise õpetamine | √ |
Maksimaalne koormus: 5 kg, ideaalne valik montaažitöödeks
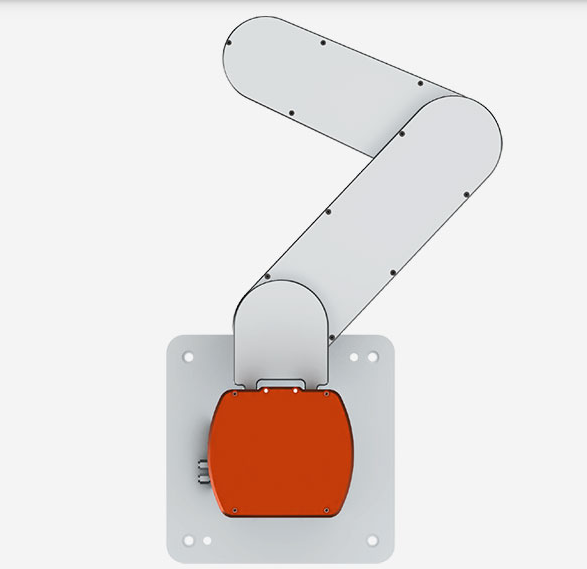
Z-Arm XX50 on painduv neljateljeline robotkäsivars, mille maksimaalne kandevõime on kuni 5 kg, see võtab enda alla väikese ala, sobib väga hästi töökohale või masina sisse paigutamiseks ning on ideaalne valik automaatsete montaažiliinide jaoks.

Kerge, suur pöördenurk

Toote kaal on umbes 28 kg, käe ulatus on kuni 275 mm, 1-telje pöördenurk on ±90°, 2-telje pöördenurk on ±164° ja R-telje pöördeulatus on ±1080°.
Selle kõrgust saab hõlpsalt kohandada
Integreeritud ajam ja kontroller, ilma lisavooluahelata, lihtne paigaldada ja integreerida, Z-telje kõrgust saab kohandada vahemikus 10–1000 mm, see võimaldab sisemist pöörlemist takistuste vältimiseks.

Paindlik juurutamiseks, kiire vahetamiseks
Z-Arm XX50 on kõrge integreeritavusega robotkäsi, millel on ruumisäästlikud ja paindlikud paigaldusomadused, see sobib kasutamiseks paljudes rakendustes, tavapärast tootmispaigutust ei muudeta, sealhulgas on võimalik kiiresti ümber lülituda ja väikeste partiide tootmist lõpule viia jne.
Suurepärane koostöö ja ohutus
Roboti käsi saab inimesega koostööd teha ilma täiendava kaitseta, et asendada räpaseid, ohtlikke ja igavaid ülesandeid ning vältida ja vähendada korduvaid pingutusvigastusi ja õnnetusjuhtumeid.

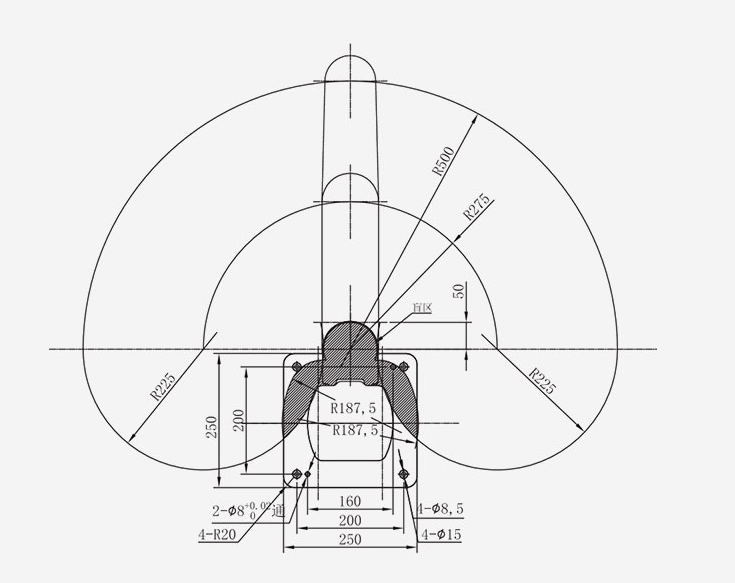
Liikumisulatus M1 versioon (väljapoole pööramine)
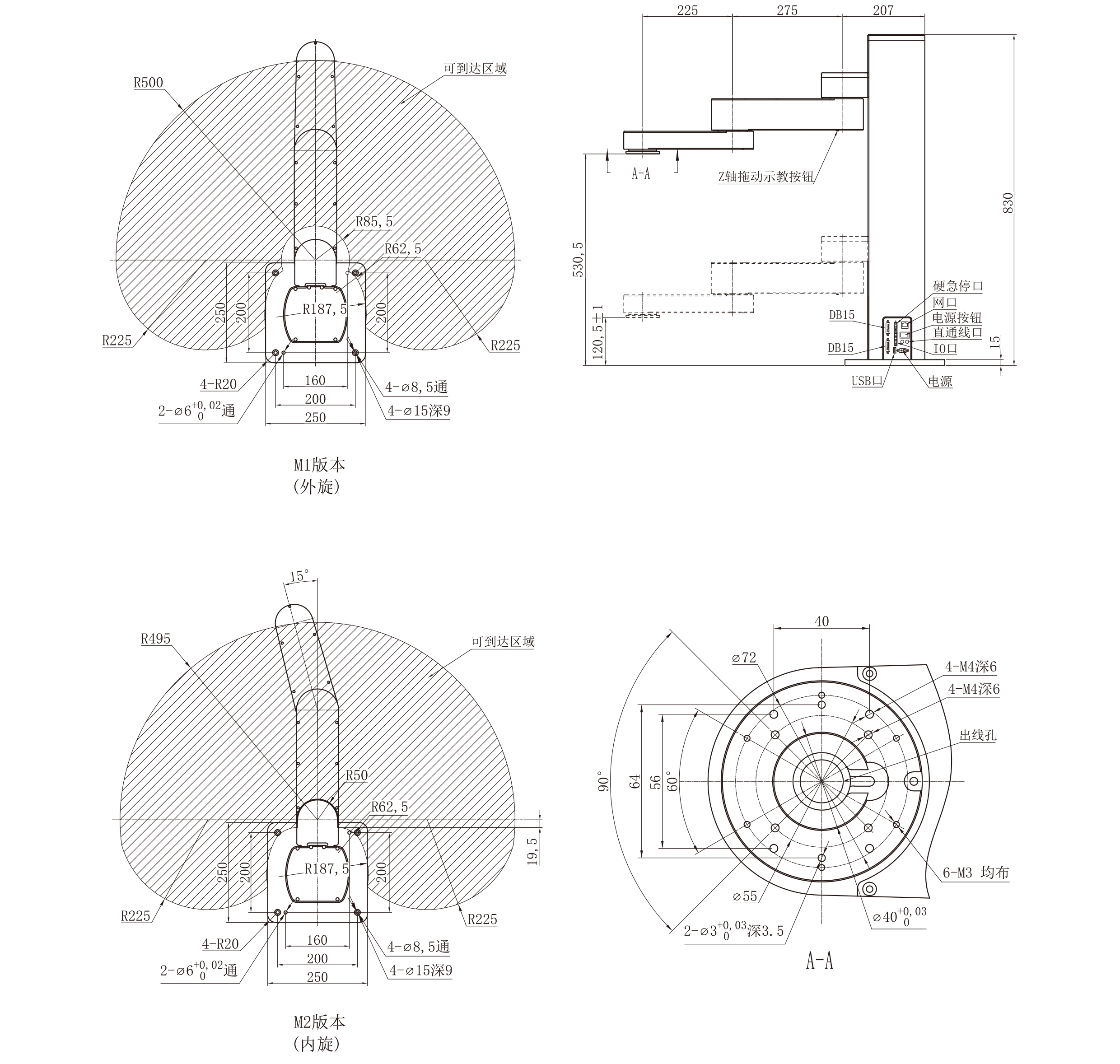
DB15 pistiku soovitus

Soovitatav mudel: Kullatud isaspistik ABS-kestaga YL-SCD-15M Kullatud emanepistik ABS-kestaga YL-SCD-15F
Suuruse kirjeldus: 55mm * 43mm * 16mm
(Vt joonis 5)
Robotkäe välise kasutuskeskkonna diagramm

Meie äri


Tootekategooriad
-

Madala hinnaga korduvkasutatav ohutus ISO sertifikaadiga kobot...
-

Szgh 6-teljeline maalimisroboti käsivarrega...
-

Hiina hulgimüüja ülitõhus 4-teljeline palletiseerija...
-
Suure jõudlusega 5-teljeline teleskooproboti käsi...
-

4086 kõrge hinnaga miniroboti käsivarrega tööstuslik...
-
Tööstusmasina robotkäe 4-teljeline manipulaator...