HITBOT ELEKTRILISTE HAARATSITE SEERIA – Z-ECG-20 kolme sõrmega elektriline haarats



Peamine kategooria
Tööstusroboti käsi / Koostööroboti käsi / Elektriline haarats / Intelligentne ajam / Automatiseerimislahendused
Taotlus

Funktsioon

·Klambri langemise tuvastamine, pindala väljundfunktsioon
·Jõu, asendi ja kiiruse reguleerimine, täpne juhtimine Modbusi kaudu
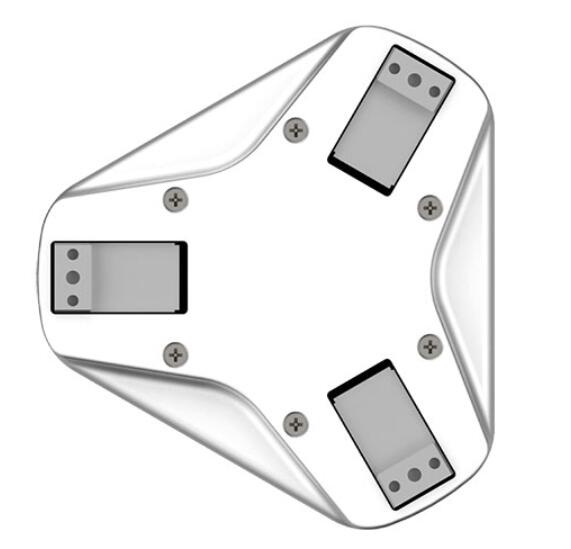
·Kolme sõrmega keskne haarats
·Sisseehitatud kontroller: väike jalajälg, lihtne integreerimine
·Juhtimisrežiim: 485 (Modbus RTU), sisend/väljund
Kolme lõuaga elektriline haarats silindriliste objektide hõlpsaks kinnitamiseks
Kõrge jõudlus
Kinnitusjõud: 30–80 N,
Kõrge energiatihedus
Suur löök
Kogukäik: 20 mm (reguleeritav)
Täpsuse kontroll
Modbusi juhitav
Kontroller on sisseehitatud
Väikese ala katmine, lihtne integreerida.
Kiire ja kõrge efektiivsusega
Korduvus: ±0,03 mm,
Ühekordne käik: 0,5 sekundit
3-lõualuuline haarats
3-lõualuuline kinnitus, sobib mitmesugusteks puhkudeks



Spetsifikatsiooniparameeter
| Mudelinumber Z-ECG-20 | Parameetrid |
| Kokku insult | 20 mm (reguleeritav) |
| Haardejõud | 30–80 N (reguleeritav) |
| Korduvus | ±0,03 mm |
| Soovitatav haardekaal | Maks. 1 kg |
| Edasikandumine režiim | Hammaslatt ja kuulliigendiga juhtrööp |
| Liikuvate komponentide määrdeainete täitmine | Iga kuue kuu tagant või 1 miljon liigutust/kord |
| Ühesuunalise liikumise aeg | 0,5 sekundit |
| Töötemperatuuri vahemik | 5–55 ℃ |
| Tööniiskuse vahemik | RH35-80()Ei jäätu) |
| Lühim aeg ühe löögi jaoks | 0,5 sekundit |
| Löögikontroll | Reguleeritav |
| Kinnitusjõu reguleerimine | Reguleeritav |
| Kaal | 1,5 kg |
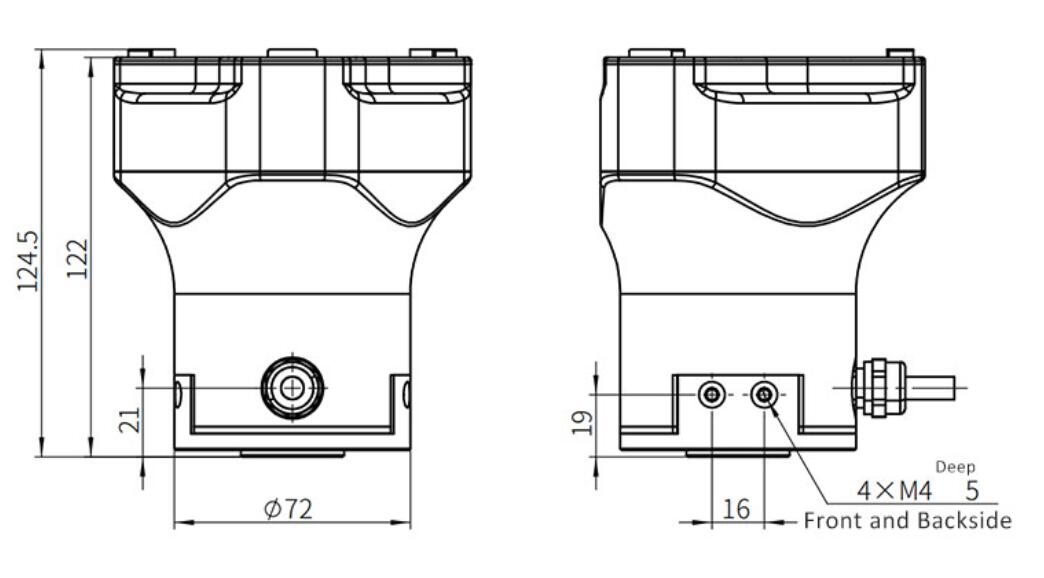
| Mõõtmed()P*L*K) | 114 * 124,5 * 114 mm |
| IP-klass | IP54 |
| Mootori tüüp | Servomootor |
| Tippvool | 2A |
| Nimipinge | 24 V ±10% |
| Ootevool | 0,8A |
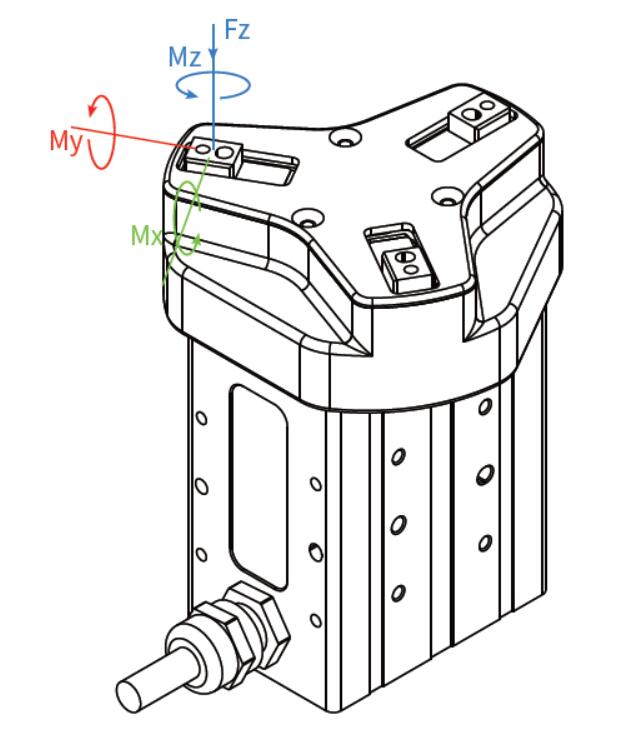
| Lubatud staatiline koormus vertikaalsuunas | |
| Fz: | 150N |
| Lubatud pöördemoment | |
| Maksekäsud: | 1,5 Nm |
| Minu: | 1,5 Nm |
| Mz: | 1,5 Nm |
Positsioneerimistäpsus, kolme sõrmega haarats
Kolme lõuaga elektrilise haaratsi kordustäpsus on ±0,03 mm ja kolme lõuaga klambri vastuvõtmiseks on sellel kukkumistesti ja sektsiooni väljundi funktsioon, mis sobib paremini silindriliste esemete kinnitusülesannetega.

Sisseehitatud kontroller, kõrge integratsioonitase
Käigu pikkus on 20 mm reguleeritav, kinnitusjõud on 30–80 N reguleeritav, see kasutab käigukasti + kuulliistu ülekanderežiime, see on sisseehitatud kontroller, kinnitusjõudu ja kiirust saab reguleerida.
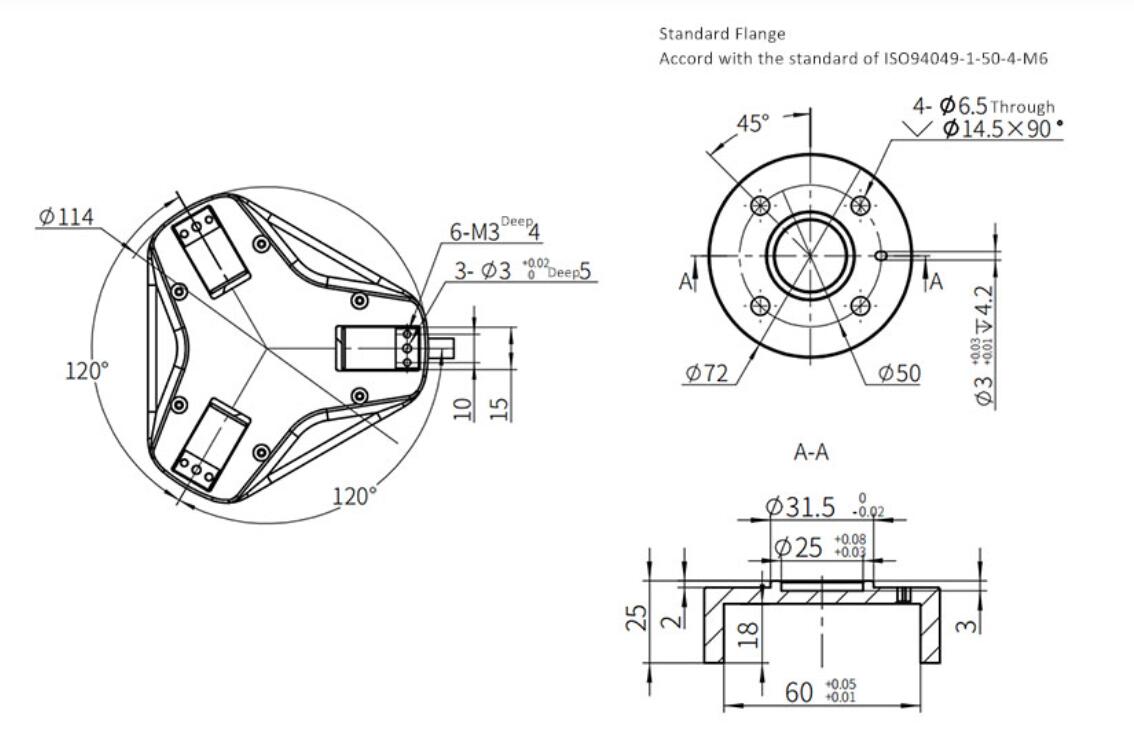
Väike suurus, paindlik paigaldus

Z-ECG-20 mõõtmed on P114 * L124,5 * K114 mm, kaal on vaid 0,65 kg, see on kompaktse konstruktsiooniga, toetab mitut paigaldustüüpi ja on hõlpsasti käsitsetav mitmesuguste kinnitusülesannetega.


Kiire reageerimine, täpne jõukontroll

Elektrilisel haaratsil on kukkumistesti ja sektsiooni väljundi funktsioon, selle kaal on 1,5 kg, veekindlus on IP20, soovituslik kinnituskaal on ≤1 kg, see võimaldab kinnitada suure täpsusega.
Mitmekordsed juhtimisrežiimid, lihtne kasutada

Z-ECG-20 elektrilise haaratsi täpsust saab Modbusi kaudu juhtida, selle haaratsi seadistamine on lihtne, digitaalse sisendi/väljundi protokolli kasutamiseks on vaja vaid ühte kaablit SISSE/VÄLJA ühendamiseks ning see ühildub ka PLC peamise juhtimissüsteemiga.

Koormuse raskuskeskme nihe
Meie äri


Tootekategooriad
-

HAARATSIMOODULI SEERIA – FPT kolme sõrmega...
-

HITBOT ELEKTRILINE HAARATSI SEERIA – Z-EFG-20 Paral...
-

DH ROBOTICS SERVO ELEKTRILINE HAARATS PGE SEERIA –...
-

HITBOT ELEKTRILISTE HAARATSITE SEERIA – Z-EFG-40...
-

DH ROBOTICS SERVO ELEKTRILINE HAARATS PGI SEERIA –...
-

DH ROBOTICS SERVO ELEKTRILINE HAARATS CG SEERIA – ...