Koostöörobot (Erc 612m/Erc 612) kuue vabadusastmega
Koostöörobot (Erc 612m/Erc 612) kuue vabadusastmega
Peamine kategooria
Tööstusroboti käsi / Koostööroboti käsi / Elektriline haarats / Intelligentne ajam / Automatiseerimislahendused
Taotlus
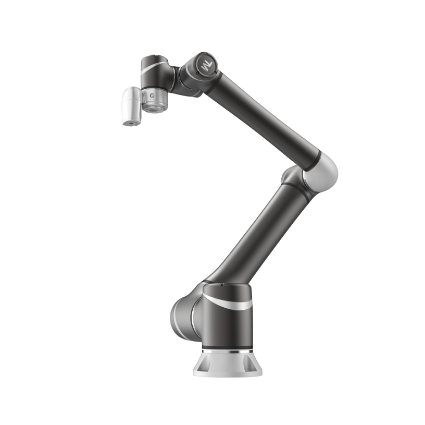
TM12-l on meie robotite seerias pikim ulatus, mis võimaldab koostööd isegi rakendustes, mis nõuavad tööstusliku taseme täpsust ja tõstevõimet. Sellel on mitmeid funktsioone, mis võimaldavad seda ohutult kasutada inimeste läheduses ja ilma mahukate tõkete või aedade paigaldamise vajaduseta. TM12 on suurepärane valik kobotite automatiseerimiseks, et parandada paindlikkust ja suurendada...tootlikkus.
Oma klassi parima nägemissüsteemi, täiustatud tehisintellekti tehnoloogia, igakülgse ohutuse ja lihtsa kasutamisegaTehisintellektiga kobot viib teie ettevõtte kaugemale kui kunagi varem.Vii automatiseerimine järgmisele tasemele, suurendades tootlikkust, parandades kvaliteeti ja vähendades kulusid.
Omadused
NUPUKAS
Tulevikukindel kobot tehisintellekti abil
• Automatiseeritud optiline kontroll (AOI)
• Kvaliteedi tagamine ja järjepidevus
• Suurendage tootmise efektiivsust
• Vähendage tegevuskulusid
LIHTNE
Kogemusi pole vaja
• Graafiline liides lihtsaks programmeerimiseks
• Protsessipõhine redigeerimise töövoog
• Lihtne käsitsi juhendamine ametikohtade õpetamiseks
• Kiire visuaalne kalibreerimine kalibreerimisplaadiga
OHUTU
Koostöös turvalisus on meie prioriteet
• Vastab standarditele ISO 10218-1:2011 ja ISO/TS 15066:2016
• Kokkupõrke tuvastamine avariipeatusega
• Säästa tõkete ja aedade kulusid ja ruumi
• Määrake kiirusepiirangud ühises tööruumis
Tehisintellektil põhinevad kobotid tunnevad ära oma keskkonna ja detailide olemasolu ja orientatsiooni, et teostada visuaalseid kontrolle ja dünaamilisi komplekteerimis- ja paigutusülesandeid. Rakendage tehisintellekti vaevata tootmisliinil ning suurendage tootlikkust, vähendage kulusid ja lühendage tsükliaegu. Tehisintellekti abil saab nägemine lugeda ka masinate või testimisseadmete tulemusi ja teha vastavalt sellele asjakohaseid otsuseid.
Lisaks automatiseerimisprotsesside täiustamisele saab tehisintellektil põhinev kobot jälgida, analüüsida ja integreerida andmeid tootmise ajal, et vältida defekte ja parandada tootekvaliteeti. Täiustage oma tehase automatiseerimist hõlpsalt tehisintellekti tehnoloogiate täieliku komplektiga.
Meie koostöörobotid on varustatud integreeritud nägemissüsteemiga, mis annab kobotidele võimaluse oma ümbrust tajuda, mis parandab oluliselt kobotite võimekust. Roboti nägemine ehk võime „näha“ ja tõlgendada visuaalseid andmeid käsurealt on üks omadustest, mis teeb meid teistest paremaks. See muudab mängu dünaamiliselt muutuvates tööruumides ülesannete täpset täitmist, muutes tegevused sujuvamaks ja automatiseerimisprotsessid tõhusamaks.
Algajatele mõeldud lahendus ei ole tehisintellektiga kobotiga alustamiseks programmeerimisoskused vajalikud. Meie vooprogrammeerimistarkvara abil teostatav intuitiivne klõpsamis- ja lohistamisliigutus vähendab keerukust. Meie patenteeritud tehnoloogia võimaldab operaatoritel, kellel pole kodeerimiskogemust, programmeerida projekti vaid viie minutiga.
Sisseehitatud ohutusandurid peatavad tehisintellektiga koboti füüsilise kontakti tuvastamisel, minimeerides võimalikku kahju survevaba ja ohutu keskkonna loomiseks. Samuti saate robotile kiirusepiiranguid seadistada, et seda saaks kasutada erinevates keskkondades otse töötajate kõrval.
Seotud tooted



Spetsifikatsiooniparameeter
| Mudel | TM12 | |
| Kaal | 32,8 kg | |
| Maksimaalne kandevõime | 12 kg | |
| Ulatus | 1300 mm | |
| Ühisvahemikud | J1, J6 | ±270° |
| J2, J4, J5 | ±180° | |
| J3 | ±166° | |
| Kiirus | J1, J2 | 120°/s |
| J3 | 180°/s | |
| J4 | 180°/s | |
| J5 | 180°/s | |
| J6 | 180°/s | |
| Tüüpiline kiirus | 1,3 m/s | |
| Maksimaalne kiirus | 4 m/s | |
| Korduvus | ± 0,1 mm | |
| Vabadusaste | 6 pöörlevat liigest | |
| Sisend/väljund | Juhtkast | Digitaalsisend: 16 Digitaalväljund: 16 Analoogsisend: 2 Analoogväljund: 1 |
| Tööriista ühendus | Digitaalsisend: 4 Digitaalväljund: 4 Analoogsisend: 1 Analoogväljund: 0 | |
| I/O toiteplokk | 24V 2.0A juhtpaneelile ja 24V 1.5A tööriistale | |
| IP-klassifikatsioon | IP54 (roboti käsi); IP32 (juhtpaneel) | |
| Energiatarve | Tüüpiline 300 vatti | |
| Temperatuur | Robot töötab temperatuurivahemikus 0–50 ℃ | |
| Puhtus | ISO klass 3 | |
| Toiteallikas | 100–240 V vahelduvvool, 50–60 Hz | |
| I/O-liides | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Suhtlus | RS232, Ethernet, Modbus TCP/RTU (master ja slave), PROFINET (valikuline), EtherNet/IP (valikuline) | |
| Programmeerimiskeskkond | TMflow, vooskeemil põhinev | |
| Sertifitseerimine | CE, SEMI S2 (lisavarustus) | |
| Tehisintellekt ja nägemine*(1) | ||
| Tehisintellekti funktsioon | Klassifikatsioon, objektide tuvastamine, segmenteerimine, anomaaliate tuvastamine, tehisintellekti OCR | |
| Taotlus | Positsioneerimine, 1D/2D vöötkoodi lugemine, OCR, defektide tuvastamine, mõõtmine, montaažikontroll | |
| Positsioneerimistäpsus | 2D positsioneerimine: 0,1 mm*(2) | |
| Silm käes (sisseehitatud) | Autofookusega värvikaamera 5M eraldusvõimega, töökaugus 100mm ~ ∞ | |
| Silmast kätte (valikuline) | Toetab maksimaalselt 2xGigE 2D kaamerat või 1xGigE 2D kaamerat + 1x3D kaamerat*(3) | |
| *(1)Saadaval on ka sisseehitatud nägemisroboti käed TM12X, TM14X, TM16X ja TM20X. *(2)Selle tabeli andmed on mõõdetud TM laboris ja töökaugus on 100 mm. Tuleb märkida, et praktilistes rakendustes võivad vastavad väärtused erineda selliste tegurite tõttu nagu kohapealne ümbritseva valguse allikas, objekti omadused ja nägemise programmeerimismeetodid, mis mõjutavad täpsuse muutust. *(3)TM Robotiga ühilduvate kaameramudelite kohta vaadake TM Plug & Play ametlikku veebisaiti. | ||
Meie äri


Tootekategooriad
-

1000 kg nutikas lasernavigatsiooniga elektriline automaat...
-

4-teljeline SCARA robotkäpp 3c tööstusele
-

Konkurentsivõimelise hinnaga tööstusrobot 6-teljeline manip...
-

6-teljeline robotkäe 10 kg kobot hea hinnaga värvimis...
-
Tööstuslik 6 teljega koostöörobot 10 kg...
-
Keevitusrobotid Robot Hwashi 6-teljeline näputäiskeevitus...